下的全速范围控制。当PMSM处于中、高速范围内时,采用滑膜观测器法来估算转子速度和位置;在零、低范围内时,采用高频信号注入法弥补实现平稳过度。仿真根据结果得出:结合滑膜观测器法和高频注入法的混合模式能够大大降低两种算法进行切换时的抖动,能够很好的实现
关键词:永磁同步电机;无传感器控制技术高频电压信号注入法滑膜观测法线 引言
永磁同步电动机的无传感器控制策略是基于永磁同步电动机的基本模型对定子绕组的电压和电流进行采样,以实现转子位置和转速的估算,但这一些方法只在一定的转速范围内适用,对于在全范围内的无传感器控制却研究甚少[2]
针对上述存在的问题,提出了一种基于全程调速的永磁同步电机无传感器控制策略。当PMSM以中速和高速运行时,滑动观察器用于跟踪和估计转子的位置和速度。当PMSM以低速运行时,使用高频信号注入方法来检测转子的位置和转速。 通过高频信号注入方法检测到的转子实际位置与理论预测位置非常接近,这对于提高系统的整体响应具备极其重大意义。

q分别为d、q轴上的电压; id、 iq分别为d、q轴上的电流; Ld、 Lq分别为d、q轴上的电感;Rs为定子电阻;ωe为转子的电角速度;ψf为永磁磁链。将式(1)经过PARK逆变换,可得数学模型为:


β分别为电压在 α 、 β 轴的电压;iα、iβ分别为电流在 α 、 β 轴的电流; eα、 eβ分别为 α 、β 轴反电动势; θe为转子的电角度。则滑膜观测器方程为:
β—电流观测值; iα、 iβ—电流观测误差;K—滑膜系数;sign (x)可表示为:
当系统转换到滑膜状态时,则有 s(x)=0,d/dt*s(x)=0。经过有限的时间间隔, i
αβ代表电压矢量; iαβ代表电流矢量;上标*代表给定量; ωrωr表转子旋转角速度; θ代表转子位置角[8]。2.2 永磁同步电机高频数学模型

当注入三相高频正弦电压信号后,PMSM内产生的空间电压矢量在 α 、 β 坐标系下产生的电压方程:
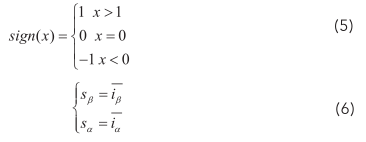
其中SMC控制器是用来控制电机的启动,加速模式下,闭环反馈系统中使电机以恒定的速率保持加速。使电机从低速平稳过渡到中、高速。
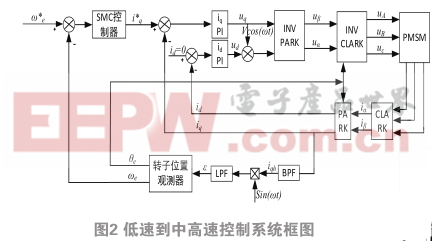
为瞬时速度对额定速度的百分比,当速度达到40%时,采用滑膜观测法独立运行。
在SIMULINK中搭建仿真模型,把混合策略控制与滑膜观测法、高频电压信号注入法分别做对比,验证混合策略的优越性,PMSM参数如表1所示。
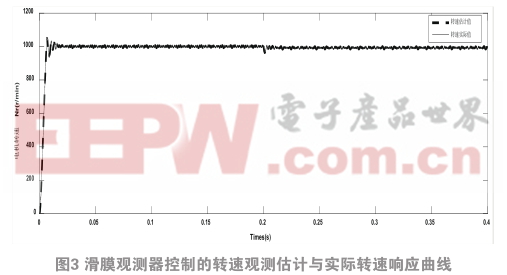
图3为基于滑膜观测器控制的转速观测估计与实际转速响应曲线,从图中能够准确的看出,系统控制策略的转速期望值为1000 r/min,在开始启动时,转速最大为1050 r/min,超调为5%,回归稳态的时间大致为0.025 s时。在0.2 s时加上1 N.m的负载,在0.21 s处重新达到稳态。
该种方法的转速观测估计曲线与实际转速曲线,从图中能够准确的看出,在开始启动时,其差值在0.01 s处达到最大为18 转。在大约0.2 s加入负载突变是位于0.21 s时差值较大,为大约为20 转,恢复时间使用大约为0.085 s。
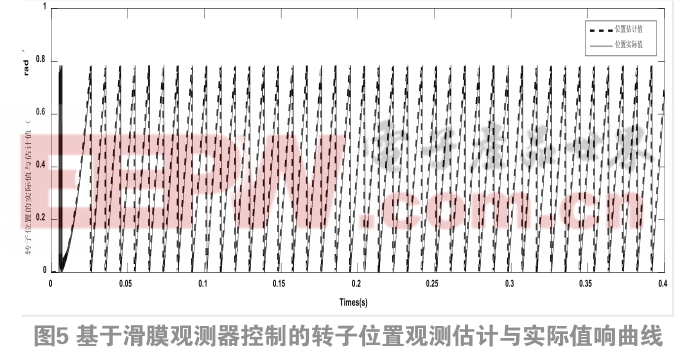
从图5中可知该种方法的位置观测估计曲线与实际转速曲线,能够准确的看出位置的估计值和实际值的误差趋近于零。
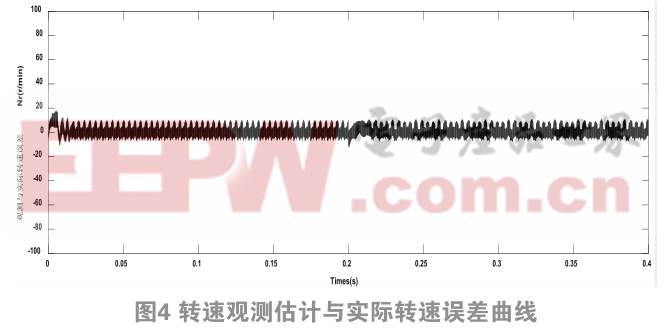
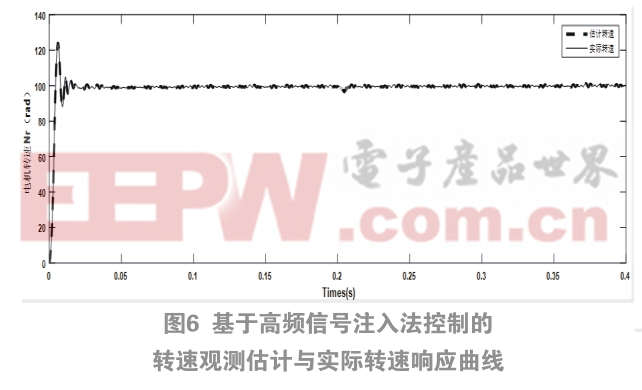
图6为基于高频信号注入法控制的转速观测估计与实际转速响应曲线,从图中能够准确的看出,在开始启动时,转速最大为125 r/min,超调为25%,回归稳态的时间大致为0.025 s时。在0.2 s时加上1 N·m的负载,在0.21s处重新达到稳态。
这种方法的转速观测估计曲线与实际转速曲线,能够准确的看出转速的估计值和实际值的误差趋近于零。
从图8可知高频信号注入法所观测的转子位置估计值与实际值误差较小,最大时约为0.096 rad。
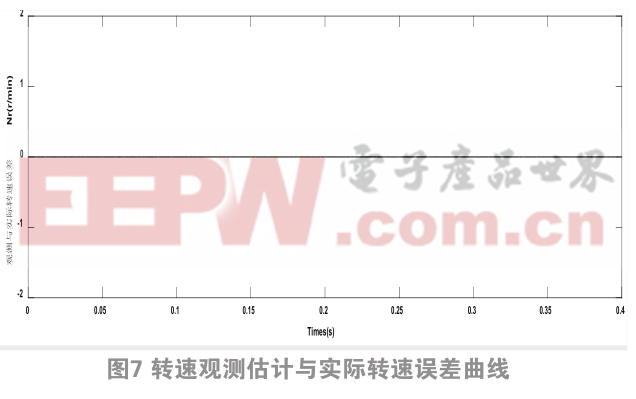
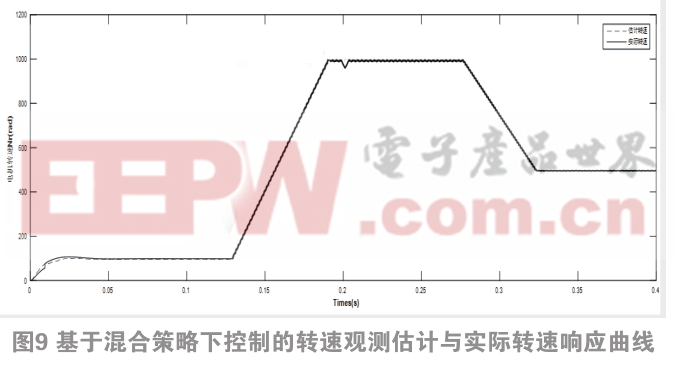
图9为混合控制策略下的转速观测估计与实际转速响应曲线,刚启动时,初始速度为100 r/min,0.13 s后开始步入混合估算模式,能够由低速平滑进入中高速区域。0.17 s后,电机能够稳定运行在1 000 r/min.运行到0.29 s后转速开始下降,在0.2 s时加上1 N·m的负载,在0.22 s处重新达平稳。整个仿真涵盖了低速到中速,高速到中速的运作时的状态过程,仿真结果可以验证PMSM全程无传感器控制在混合控制策略下的效果。 能够准确的看出,估计的转子位置与在混合策略下观察到的实际值之间的误差在一些范围内很小,并能始终保持高精度,鲁棒性良好。
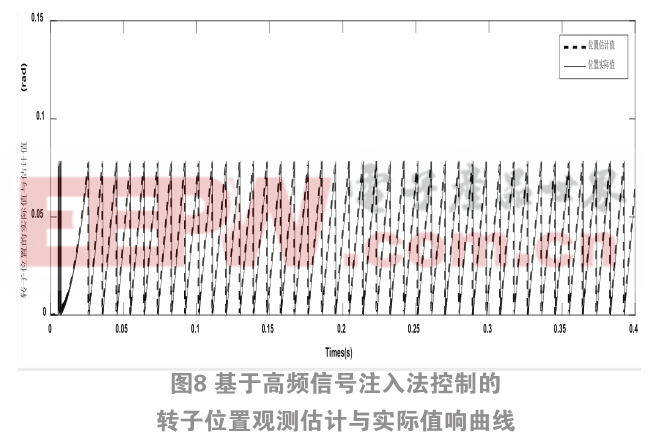
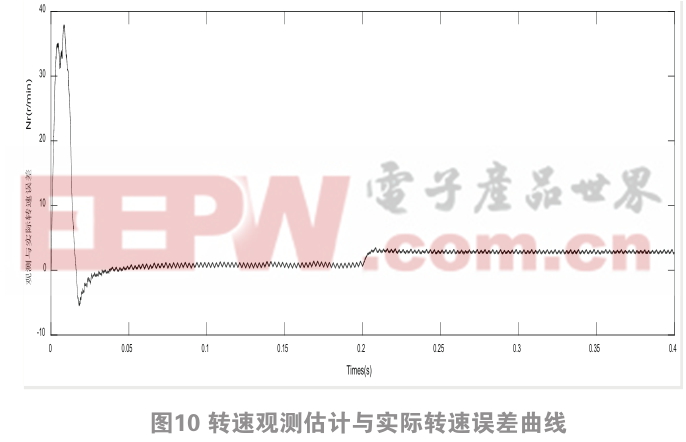
图10为该种方法的转速观测估计与实际转速误差曲线,能够准确的看出在电机刚起步时,差值在0.02 s最大达到35转。到达稳定状态经过大约为0.05 s,在混合控制策略下误差较小,整个输出转速波形呈现良好的收敛效果。
从图11可知此法所观测的转子位置估计值与实际值误差非常小,最大时约为0.25 rad。
本文通过对PMSM低速到中高速全速范围运行时的不同操控方法进行研究和分析,概括了PMSM的无传感器控制管理系统的整体方案设计,详细的介绍了高频信号注入法、滑0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4Times(s)

图11 基于混合策略下控制的转子位置观测估计与实际值差值曲线膜观测法在永磁同步电机中的各自应用,分析了它们彼此的优势与缺点,提出了一种将高频信号注入法、滑膜观测法相结合的混合操控方法。仿真根据结果得出,将高频信号注入法和滑膜观测器法有机的结合在一起,在电机控制中能很好的对转子位置和转速进行跟踪处理,与单独使用高频信号注入法、滑膜观测法相比跟踪的速度快,并且在整个跟踪过程中,有很强的抗扰能力,鲁棒性较好,PMSM可以在一定程度上完成低速向高速稳定切换。


